
FINAL CONCEPT MODEL
This is a rendered model of our final design concept. The head houses a lamp along with four infrared sensors, each one correlating to a direction. The head moves up and down a 180 degree track cut out of the sphere for vertical motion, while the body swivels around for lateral motion. The combination of the two allows for full simultaneous range of motion in both directions.
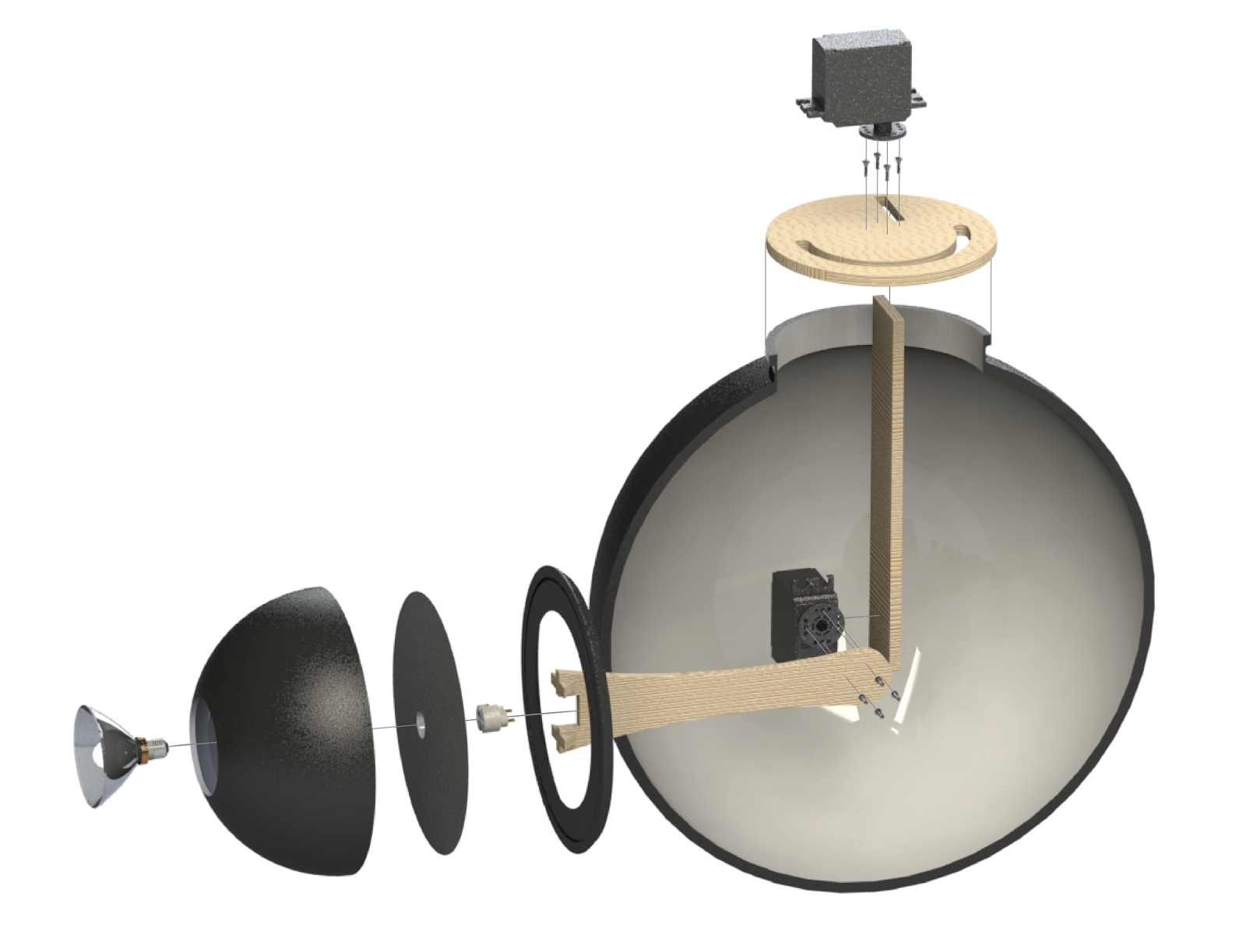
PHYSICAL ASSEMBLY
This is an exploded view of the inside pieces of our lamp. A servo motor connects to a cap that connects to the top lip of the globe, creating lateral rotation. A circular cutout allows for wires to come out the top and connect to the power sources and Arduino. A stationary arm comes down to a centered servo motor, which rotates an arm connected to the head for vertical motion. The head houses the light as well as the infrared sensors.

CONNECTING PIECES
In order to make disassembly and reassembly convenient, we built a twisting lock to connect the arm to the head using custom 3D printed and laser cut pieces. The arm fits into the slot and locks tight with a 90 degree twist, while allowing room for cords to fit through the center hole.

Cutting that slit in the globe was insanely difficult. Taking a bandsaw to an acrylic sphere caused all sorts of potential problems, and we only had one shot. We built a super secure jig to keep it in place, and went extremely slow to keep the globe from shattering. A few shards came off, so we 3D printed and sanded down some pieces to plug the holes.
No comments:
Post a Comment