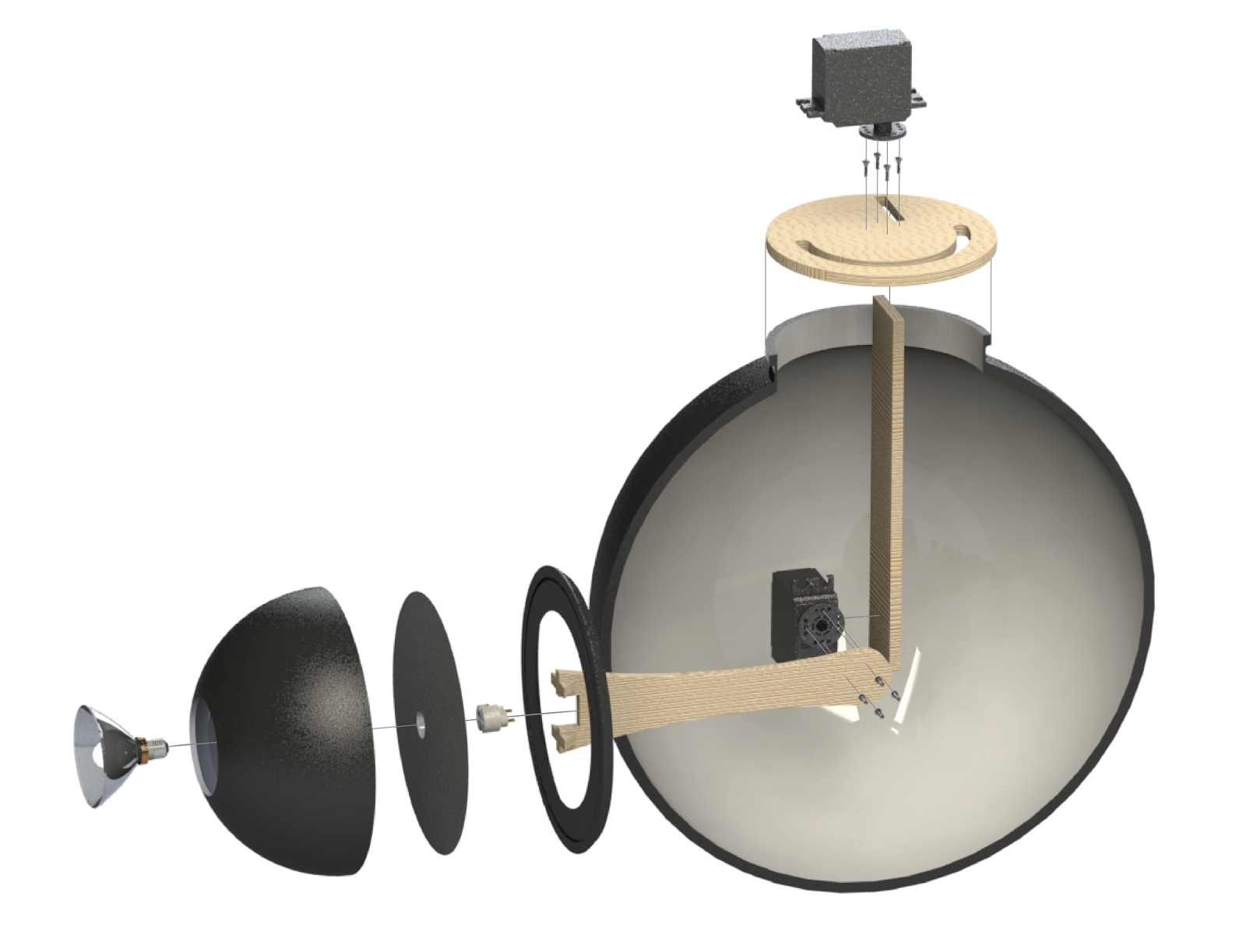
Kylen and I present müd: a lamp that senses the presence and temperature of someone's hand and displays the color of the mood that relates to that temperature! We have a photo cell in the palm which senses light; if it's covered, the three thermistors at the fingertips will begin to read the temperature. Once the photo cell is covered, and the loop of colors has completed, the light turns bright white. Once the temperature is read, the color switches to the color which relates to this temperature; the chart of the colors and the related moods (emoji) is included below.


 https://vimeo.com/169797098
https://vimeo.com/169797098
code:
//Libraries
#include <Adafruit_NeoPixel.h>
#include <math.h>
//Converting thermistor input to degrees F
double Thermistor(int RawADC) {
double Temp;
Temp = log(10000.0*((1024.0/RawADC-1)));
Temp = 1 / (0.001129148 + (0.000234125 + (0.0000000876741 * Temp * Temp ))* Temp );
Temp = Temp - 273.15;
Temp = (Temp * 9.0)/ 5.0 + 32.0;
return Temp;
}
//Photocell
int photocell = 0;
//Lights
int LED = 9;
//Neopixel Setup
#define PIN 9
Adafruit_NeoPixel strip = Adafruit_NeoPixel(8, PIN, NEO_RGB);
void setup() {
strip.begin();
strip.show(); //Initializa all pixels to 'off'
pinMode(LED, OUTPUT);
pinMode(A1, INPUT);
Serial.begin(9600);
}
void loop() {
int val;
double temp;
photocell = analogRead(A1); //photocell is A1
//Read thermistor values
int sensorValue=analogRead(A3);
int sensorValue2=analogRead(A4);
temp=Thermistor(sensorValue/2 + sensorValue2/2);
//Print temperature
Serial.print("Temperature = ");
Serial.print(temp);
Serial.println(" F");
delay(1000);
if (photocell < 200) {
for (int i; i<7; i++) {
strip.setPixelColor(i, 255, 255, 255);
}
}
else {
if (temp < 80) {
strip.setPixelColor(0, 255, 0, 0);
strip.setPixelColor(1, 255, 0, 0);
strip.setPixelColor(2, 255, 0, 0);
strip.setPixelColor(3, 255, 0, 0);
strip.setPixelColor(4, 255, 0, 0);
strip.setPixelColor(5, 255, 0, 0);
strip.setPixelColor(6, 255, 0, 0);
strip.setPixelColor(7, 255, 0, 0);
//Red when the photocell is covered, and temperature is below 80 degrees
delay(10);
}
else if (temp > 80 && temp <= 87) {
strip.setPixelColor(0, 0, 255, 0);
strip.setPixelColor(1, 0, 255, 0);
strip.setPixelColor(2, 0, 255, 0);
strip.setPixelColor(3, 0, 255, 0);
strip.setPixelColor(4, 0, 255, 0);
strip.setPixelColor(5, 0, 255, 0);
strip.setPixelColor(6, 0, 255, 0);
strip.setPixelColor(7, 0, 255, 0);
//Green when the photocell is covered, and temperature is between 80 and 87 degrees
delay(10);
}
else if (temp > 87 && temp <= 92) {
strip.setPixelColor(0, 0, 0, 255);
strip.setPixelColor(1, 0, 0, 255);
strip.setPixelColor(2, 0, 0, 255);
strip.setPixelColor(3, 0, 0, 255);
strip.setPixelColor(4, 0, 0, 255);
strip.setPixelColor(5, 0, 0, 255);
strip.setPixelColor(6, 0, 0, 255);
strip.setPixelColor(7, 0, 0, 255);
//Blue when the photocell is covered, and temperature is between 87 and 92
delay(10);
}
}
Serial.println(photocell);
strip.show();
}