
Situation #1: While watching TV or listening to music, changing
listening conditions or playback levels require the listener to continually
adjust the volume to match changing conditions. (This may occur due to extreme
differences in dialog vs. sound effects in movies, changes in playback levels
between music tracks or during commercials, or changes in ambient noise levels
due to changes in room or vehicle noise.)
1. Reduce/increase the volume as ambient noise changes.
2. Detect changes in signal strength and adjust volume accordingly.
3. (In a vehicle) match the volume to vehicle speed.
4. Normalize the signal in real time. (Would require a signal delay and buffer)
5. Change the ambient noise level.
1. Reduce/increase the volume as ambient noise changes.
2. Detect changes in signal strength and adjust volume accordingly.
3. (In a vehicle) match the volume to vehicle speed.
4. Normalize the signal in real time. (Would require a signal delay and buffer)
5. Change the ambient noise level.
Scenario 1.3: Since the ‘road
noise’ encountered in a moving vehicle is a combination of both mechanical
noise from the engine, transmission, exhaust, and tires, and air flow over the
car as a result of both the car’s movement and wind, measuring the vehicle’s speed
directly is insufficient since it does not factor in wind. A microphone might
be considered but it would also pick up sound from the speakers as well. Either
additional sensors would be required to allow for the car’s sound system, or
samples would need to be taken without the sound system playing. An alternative
means of gauging noise while eliminating the need to factor in the contribution
of the stereo itself would be the use of a flex sensor (SEN-10264, http://www.sparkfun.com/products/10264).
The sensor could be sandwiched between two plastic strips of appropriate
stiffness and mounted externally. As airspeed over the car increases, the
assembly would flex. The resulting signal could be processed and used to adjust
the volume.
1. Directly compare the size of the vehicle to the size of the
space. (Project representative points into the space)
2. Indirectly compare the size of the vehicle to the size of
the space. (Measure the space)
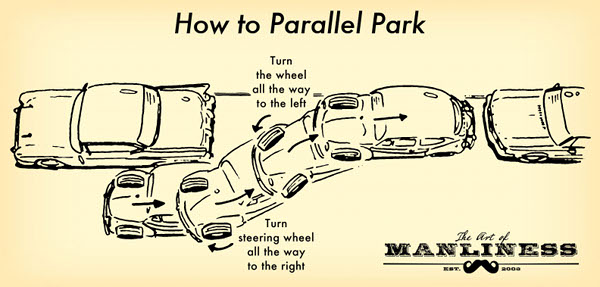
3. Determine how much room there is to maneuver (parallel) or
free space (Nose in).
4. Visualize the path that will result from current steering wheel
position.
5. Receive early warnings of contact with other vehicles or
obstructions.
Scenario 2.2: By using Ultrasonic
Module HC-SR04 Distance Sensor - http://ak.buy.com/PI/0/500/223441164.jpg
– the distance in a parallel space could be measured by stopping next to one
car and measuring the distance to the next car. If the sensor were to be
mounted at a shallow angle, allowing it to look ahead, it could first return a
true/false value to the program (false when a sudden increase in distance is
sensed, indicating an opening) it could then return a distance to the next true
value, indicating the next car. The arduino could then calculate the opening
and alert the driver if the space is within parameters.
{kind=link}
No comments:
Post a Comment